|
KnowLang employs special knowledge structures and a reasoning mechanism for modeling autonomic self-adaptive
behavior. Such a behavior can be expressed via KnowLang policies, events, actions,
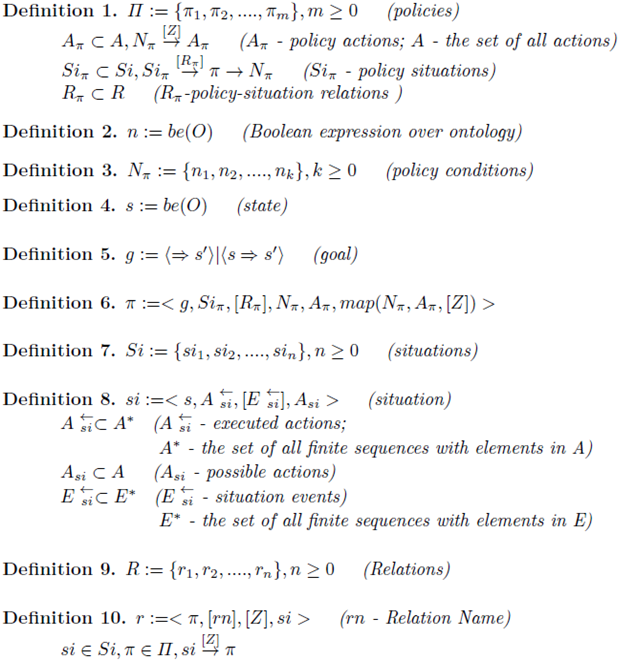
situations, and relations between policies and situations (see the Definitions below). Policies (Π)
are at the core of self-adaptive behavior. A policy (π) has a goal (g), policy situations (Siπ),
policy-situation relations (Rπ), and policy conditions (Nπ) mapped to policy actions (Aπ) where the
evaluation of Nπ may eventually (with some degree of probability) imply the evaluation of actions.
A condition is a Boolean expression over the ontology, e.g., the occurrence of a certain event. A goal (g) is a
desirable transition to a state, or from a specific state, to another state (formally denoted with s => s0). A
state (s) is a Boolean expression over ontology (be(O)).
Ideally, KnowLang policies (Π) are specified to handle specific situations, which may trigger the
application of policies. A policy exhibits a behavior via actions generated in the environment or in the system
itself. Specific conditions determine which specific actions (among the actions associated with that policy)
will be executed. When a policy is applied, it checks what particular conditions are met and performs the
mapped actions. An optional probability distribution may additionally restrict the action execution. Although
initially specified, the probability distribution is recomputed after the execution of any involved action.
The re-computation is based on the consequences of the action execution, which allows for reinforcement learning.
|